Cyclops: Open Platform for Scale Truck Platooning (ICRA 2022)
Hyeongyu Lee, Jaegeun Park, Changjin Koo, Jong-Chan Kim, and Yongsoon Eun
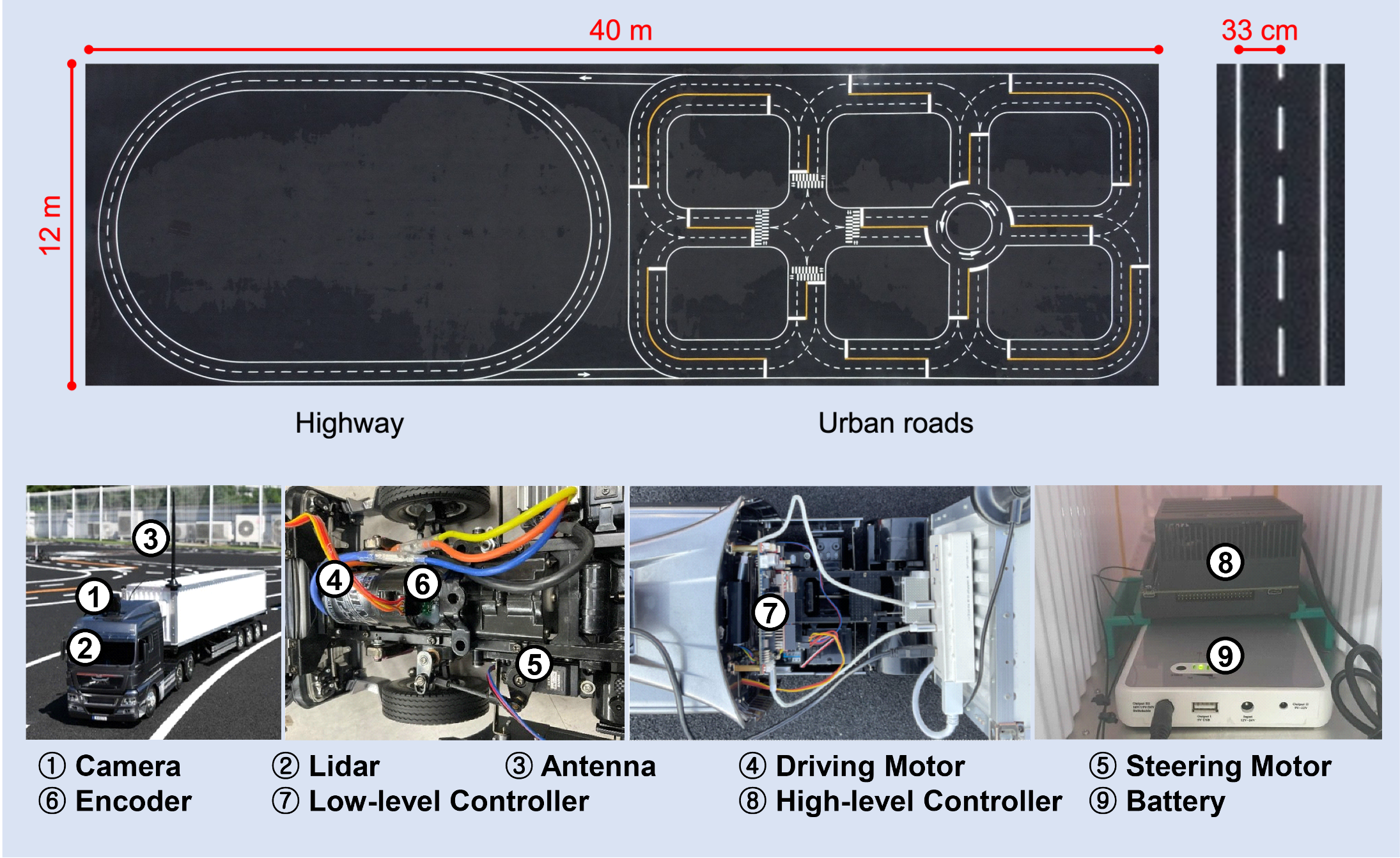
Cyclops, introduced in this paper, is an open research platform for everyone that wants to validate novel ideas and approaches in the area of self-driving heavy-duty vehicle platooning. The platform consists of multiple 1/14 scale semi-trailer trucks, a scale proving ground, and associated computing, communication and control modules that enable self-driving on the proving ground. A perception system for each vehicle is composed of a lidar-based object tracking system and a lane detection/control system. The former is to maintain the gap to the leading vehicle and the latter is to maintain the vehicle within the lane by steering control. The lane detection system is optimized for truck platooning where the field of view of the front-facing camera is severely limited due to a small gap to the leading vehicle. This platform is particularly amenable to validate mitigation strategies for safety-critical situations. Indeed, a simplex structure is adopted in the embedded module for testing various fail safe operations. We illustrate a scenario where camera sensor fails in the perception system but the vehicle operates at a reduced capacity to a graceful stop. Details of the Cyclops including 3D CAD designs and algorithm source codes are released for those who want to build similar testbeds.
R-TOD: Real-Time Object Detector with Minimized End-to-End Delay for Autonomous Driving (RTSS 2020)

Wonseok Jang, Hansaem Jeong, Kyungtae Kang, Nikil Dutt, Jong-Chan Kim
For realizing safe autonomous driving, the end-to-end delays of real-time object detection systems should be thoroughly analyzed and minimized. However, despite recent development of neural networks with minimized inference delays, surprisingly little attention has been paid to their end-to-end delays from an object’s appearance until its detection is reported. With this motivation, this paper aims to provide more comprehensive understanding of the end-to-end delay, through which precise best- and worst-case delay predictions are formulated, and three optimization methods are implemented: (i) on-demand capture, (ii) zero-slack pipeline, and (iii) contention-free pipeline. Our experimental results show a 76% reduction in the end-to-end delay of Darknet YOLO (You Only Look Once) v3 (from 1070 ms to 261 ms), thereby demonstrating the great potential of exploiting the end-to-end delay analysis for autonomous driving. Furthermore, as we only modify the system architecture and do not change the neural network architecture itself, our approach incurs no penalty on the detection accuracy.
Camera and Radar-based Perception System for Truck Platooning (ICCAS 2020)
Tae-Wook Kim, Won-Seok Jang, Jaesung Jang, Jong-Chan Kim
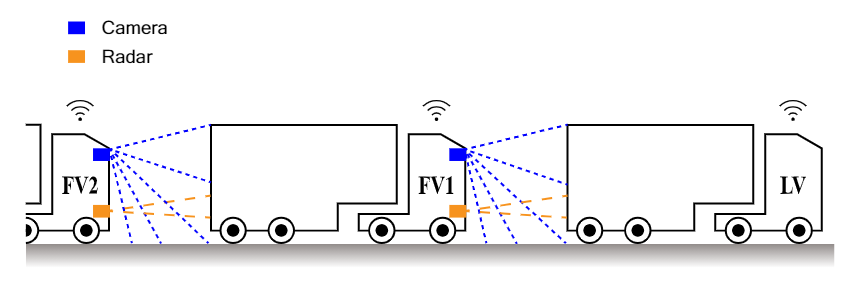
Truck platooning is a driving method with multiple trucks maintaining a very close gap between them, e.g., under 10~m at 90~km/h. The close longitudinal distance imposes a challenge for its perception system since a major portion of the front direction is occluded by the trailer in front. With this challenge, we present a radar and camera-based perception system for truck platooning. First, to improve the lane detection accuracy even with the serious occlusion problem, the distance to the front vehicle obtained by a radar is exploited to set a precise region of interest (ROI). Second, a state-of-the-art camera-based object detector is employed with our vehicle tracking mechanism. Third, the vehicle tracking information from the radar is fused to provide more reliable longitudinal information which is not available in the camera. Above methods are actually implemented in an embedded computer and evaluated in a highway driving scenario with prototype trucks.
AUTOSAR Runnable Periods Optimization for DAG-Based Complex Automobile Applications (Applied Sciences)
Daeho Choi, Tae-Wook Kim, Jong-Chan Kim
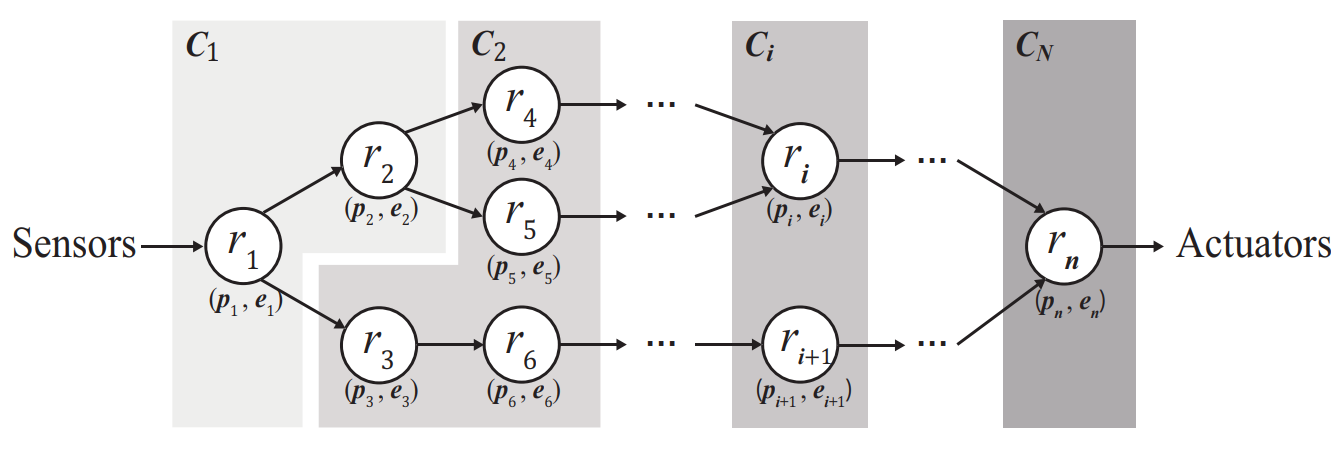
When developing an automobile control application, its scheduling parameters as well as the control algorithm itself should be carefully optimized to achieve the best control performance from given computing resources. Moreover, since the wide acceptance of the AUTOSAR standard, where finer-granular scheduling entities (called runnables) rather than the traditional real-time tasks are used, the number of scheduling parameters to be optimized is far greater than the traditional task-based control systems. Hence, due to the vast problem space, it is not feasible to reuse existing time-consuming search-based optimization methods. With this motivation, this paper presents an analytical codesign method for deciding runnable periods that minimize given control cost functions. Our solution approach, based on the Lagrange multiplier method, can find optimized runnable periods in polynomial times due to its analytical nature. Moreover, our evaluation results for synthesized applications with varying complexities show that our method performs significantly better (12% to 59% of control cost reductions) than a state-of-the-art evolutionary algorithm. To the best of our knowledge, this study is one of the first attempts to find runnable periods that maximize a given system’s control performance.
